
Initial Design
As you can read in our last post, Team Alarm’s task was to design an unmanned aerial system (or drone) to deter bears from encroaching on farmland and to help avoid harmful and potentially dangerous interactions between hams and bears. We began with a direct approach to our problem by attaching our agreed-upon aversive stimuli on a 3DR Solo drone. Since our method included sound and lights, we recreated the 3DR Solo in Rhino (a computer-aided design software) and proceeded to modify and equip the drone with sound, light, and wireless charging capabilities. The concept included an underbelly attachment that sat on the ground when the drone lands to make wireless charging possible. We added speakers to the same module, and the light sources were originally envisioned to be tapped to the drone’s already existing flying lights, magnified for a more alarming effect.

Team ALARM’s initial drone design
Form
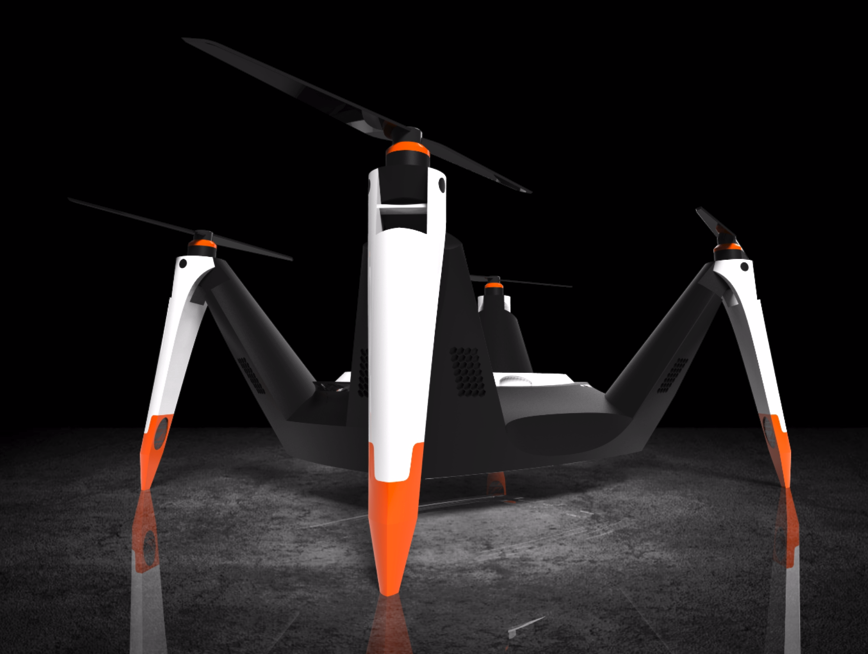
As the design proved to be lacking in uniqueness and originality, we pushed the design away from using an existing drone to conceptualizing a completely unique model. The new design direction opened up a whole new dimension of possibilities. Sketches started to show a spider-like form, with a low-sitting body supported by bent knee-like appendages. Atop the knee joints arose propeller modules and motors pointing predominately to the sky. The body showed a top-mounted solar energy panel and directly underneath a pattern of lights organized like an alien medallion of royalty and superstition. Among the lights avisible wireless charging coil pack is depicted which would make contact with the drone’s potential power supply station.

Function
The new design direction inspired the team to push the form past mere aesthetic with the introduction of suspension and automated height control. This being a vertical take-off drone, the landings require absorption. This initially created an issue for us due to the body hanging close to the ground, requiring the design to be considered at the propellers. Simple soft landing feet at the tips of the legs were not good enough, so we proposed a joint at the highest point of the knees allowing the legs to spread apart upon impact with the ground. This decision also caused us to reconsider the placement of the motors with props to be moved to the inner beam attached to the body. Propellers have to be pointing up at all times which was made possible with the displacement of the motors.
As great an idea solar energy could have been to power the drone, it was limited as a practical solution because there would be no energy source to charge the battery at night. Since the drone will be used primarily after dark or before sunrise, the solar panel atop the body was scrapped in favor of a slim battery unit.
Form and Function Combine
As we made these modifications, our drone started to finally take shape as a potentially functional and effective repellent device. The saying “get big when you see a bear” became the next idea to drive the design process. What better way could the already retractable legs come handy than to use them as a means of amplifying the size of the drone? With the combination of lights at the bottom tips of the legs we now created an allusion of a much larger flying object. This modification created a potential threat to the integrity of the propellers. If not designed properly, the drone legs could could collide with the spinning props, resulting in flight failure and a crash. To mitigate against this, we used a dowel technique to counter this issue by sitting the point of axis of the knee joint well outside the boundaries of the spinning blades.
Upon 3D printing the first, high-fidelity concept, a miscalculation occurred with the length of the contact legs. They turned out to be too short for any kind of absorption upon impact during a landing procedure. This issue was fixed by simply extending the legs by approximately an inch to give the drone more ground clearance and suspension. So as the drone lands, the legs would slightly separate, taking the weight upon themselves and not allowing the body to make contact with the landing surface. After settling, the drone would carefully lower the body via motors to the charging port to initiate wireless charging.

The final drone prototype, complete with Team ALARM Branding
Branding
After all said and done, the newly conceived idea badly needed a new name. The team sat down one night and introduced to the world ALARM Innovations — ALARM being an acronym for Aversive Learning Aerial Repellent Module. The drone became known as the NB-Series, relating to it’s roots in combating the issue of nuisance bears. We also provided the brand a logo featuring a giant black letter A encompassing the letter L in tangerine orange. We placed the logo on the white battery pack atop the drone’s body, accompanied by two orange and gloss black strips running down the sides.
Looking Forward
Ideally the ALARM Innovations NB30 drone would be equipped with all the software, motors, lights, and sound generators to make our concept a reality. From a design standpoint, the body will have to fabricated from a more mass production-friendly manufacturing process of mold making and injection molding procedures. The software would be the greatest hurdle to overcome due to the complications with signal commands from ground sensors to the drone. Along with development challenges, the implication of such a system could also be hindered by the law in aviation and unmanned systems. Perhaps in the near future such systems will get a green light to help insure the safety and prosperity of humans and animals.

A snapshot of the final prototype at the Innovation Summit at JMU X-Labs, April 27, 2018.