

Initial Design
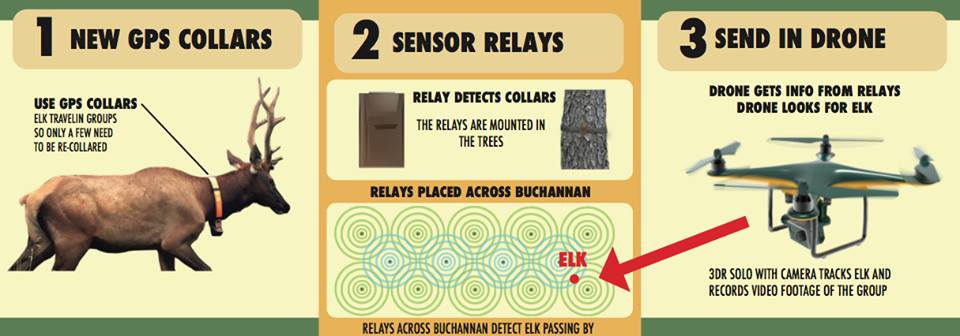
Our initial design concept involved using a 3DR solo drone, GPS collars, a router, and a computer. The elk are already collared with a GPS Xbee, which is a technology that tracks location and sends it to a transmitter. As the elk move throughout the different areas of Buchanan, the team will have already placed several gps relay systems that will be able to detect the collared elk as they walk by. The relay system will have something called a raspberry pi attached to it that will serve as a communicator to send the gps signal to another server. A drone will then be flown over the relay area at a given time interval to fetch the gps data and then send it back to the database (computer). We would then acquire the GPS coordinates, timestamp, specific animal ID number, as well as a pin map of pinged locations. The final step would be to have the drone fly over the specific location to take visuals with a GoPro and then fly back to deliver the imagery.
Methods
We developed an experiment that would test our initial method, much like the image above. Here was our process:
- One team member will go out into a forest with a mock collar. The member will purposefully walk past the placed relay system, which will have a raspberry pi associated with it. This will function as a server that communicates to another server at JMU.
- The drone will then fly across the area and hone in on the location, using the GPS frequency.
- It will then broadcast the GPS data back to the main computer database system. The database will contain these GPS/time stamp/animal ID logs as well as produce a pin map of pinged locations on Mission Planner.
- The drone will then sweep over the specific area with a GoPro mounted on the belly to record visuals.
- We will then review the visual data and see if we can detect the team member that was in the forest.
Experiments & Results
We conducted two field experiments using technology that we planned to incorporate on our drone. The first test was conducted at Purcell Park in Harrisonburg, which is mostly open grassland. Our main goal was to test how high we could get the drone up in the air to test limits of elevation as well as wind. We used a 3DR Solo drone, which at the time was in our initial design concept. We also tested how well the drone could fly within the wooded areas. Each team member got the chance to carefully fly the drone throughout the treeline with no damage done to the system. This experiment resulted in the team understanding how to navigate a drone as well as test the boundaries of how high the drone can be controlled in the air. The second experiment we conducted focused on testing thermal imaging technology above a heavily foliated area. For this test, the team went with aviation pilot, Asa, to JMU’s Arboretum, which is a park on campus that is surrounded by trees. We attached a thermal lensed camera to the drone and had team members scatter throughout the wooded area to see if their body heat would be detected from the camera. We were able to detect each member from 250 feet above the ground. It was not until the drone reached around 350 feet when the camera was unable to detect the team members.


Final MVP
Future Directions
Currently, our drone was created for VDGIF specifically for locating and tracking elk in Buchanan, but we designed this drone in a way that could be used for any type of surveying and locating. We created this drone as a fixed wing, so that it can quickly scan areas of land and take footage using a gopro. It also uses a flir infrared camera to identify what is beneath the drone. Basically, we see this taking a future direction of being used for any type of surveying, whether that be for animal conservation or even just to get footage of land for real estate, videography, and more. The gimbal stabilizes the camera for a smooth recording. When we started this project, our team name was originally Team Deer & Elk, since then we have renamed to Team Tree Line. The reasoning for the switch is because our final design can easily locate and track all sorts of things from just above the treeline and not just elk. Throughout this semester, we have worked with a number of dedicated professionals who have taken the time to help us plan, experiment, and understand the complex information that we needed to learn to conduct this project. Our team would first like to thank our sponsor, the Virginia Department of Game and Inland Fisheries. In particular, we would like to thank all that conservationist, David Kalb, did for our team throughout the semester. We would not be able to conduct our field tests with flying drones in public areas without the help of aviation expert, Asa Taylor. Drone/tech expert, Fred Briggs, played a major role in guiding us through what sorts of technology we could incorporate into our project. We also would like to send our appreciation to the rest of the staff that worked with our team this semester.