Initial Approach
The initial direction for animal tracking was to utilize a drone to detect ultra high frequencies to determine the general location of bears previously collared by the Virginia Department of Game and Inland Fisheries. Our original designed drones were planned to be outfitted with a camera that would take pictures a safe distance away from the bears. However, the device used by VDGIF, when attached, was too heavy for the drone to get off the ground. Acquiring a new device that could be disassembled, made compact, and attached to the drone was out of our price range, so, we decided to go back to the drawing board and look at our main problem: the collars.
New Approach
These new collars are designed to obtain various kinds of data including a direct location provided by GPS. Additional data types include: orientation of the bear, an accelerometer, ambient temperature, and GPS to better determine the bear’s position, frequency of movement and behavior. These data types are saved to an SD card for retrieval at a later time when a drone is commanded to find the GPS location and act as the medium between the collar data and the user’s computer. We also use an Arduino, a customizable command device, as the “brain” of the collar redesign to control all of the operations. This “brain” connects to an Adafruit BNO_055 9 Degrees of Freedom sensor, which records the orientation, acceleration, and temperature outside the collar – similar to a Fitbit’s tracking abilities. The Arduino is also connected to an Adafruit GPS unit, which provides information about the current date and time, as well as, the current latitude and longitude of the collar’s location. The collar will assemble the information beginning with the time and place they were taken in, so that researchers may have a more accurate idea of the bear’s activity. The collar also possess an XBee unit that will allow the collar to transmit its data over a long distance. Our drone is designed to detect the collar, move into position to download data saved on the SD card, and remain stationary until the data transfer process is complete.
Testing Equipment
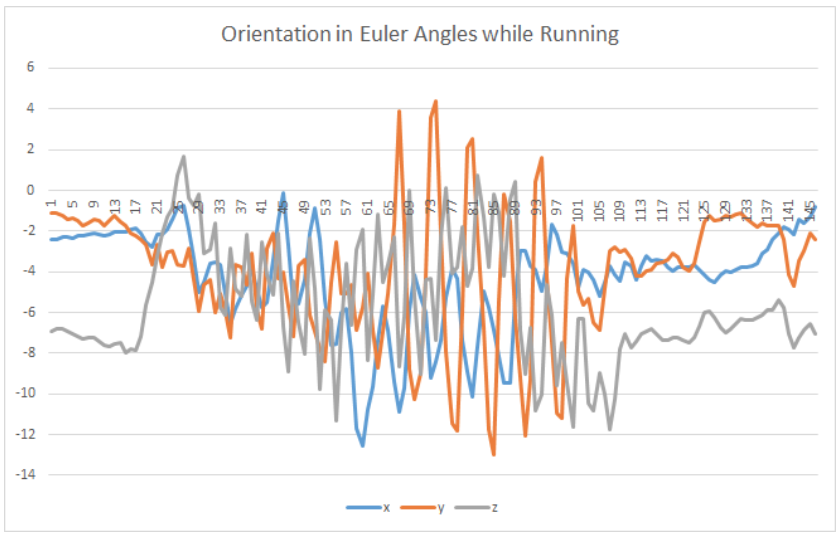
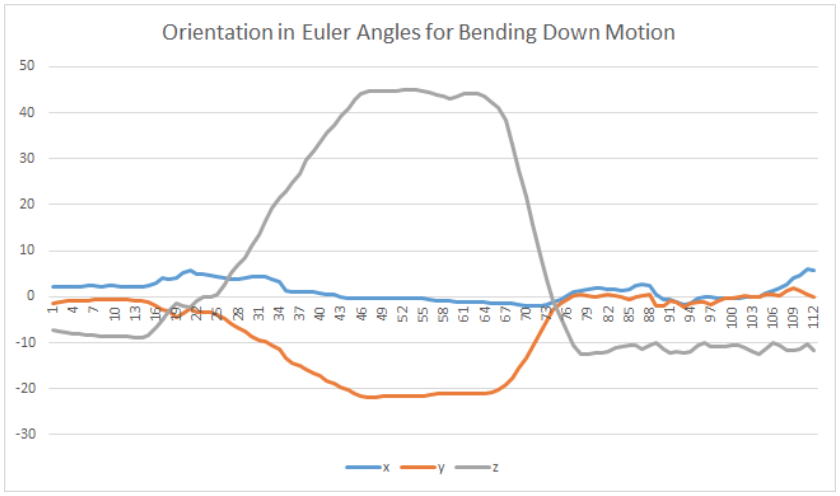
We conducted several experiments using the Adafruit sensor. In the first experiment, we held the sensor still, then walked forward for a few steps, followed by standing still for a few more seconds. In the second experiment, we repeated the process from our first experiment, yet we ran forward rather walking forward. In the final experiment, we held the sensor still, then bent down to simulate a bear eating something off the ground. As you can see by the graphs below, we got clear, readable data from our experiments. It is clear when the action began and ended. We are confident our collar can pick up different activities the bears are doing.
The Minimal Viable Product
Our Minimum Viable Product (MVP) will consist of the Arduino “brain,” the two sensors (9 degrees of freedom and GPS), and an SD card reader/writer. It will obtain orientation and GPS information from the collar, and save the information to the SD card to be retrieved manually and analyzed. Given the time constraints, we were unable to implement the wireless transfer of data.
Future Direction
If given more time, we would aim to implement the data transfer feature by either making a drone an efficient data transfer medium or eliminating the drone altogether by increasing the collar’s data capture range. We would also hope to utilize smaller components to miniaturize the collar’s data resources.
Use the arrows below to view the collar technologies and future drone models.